Robótica social, la ciencia detrás de la interacción humana
Te compartimos un interesante artículo de la revista +Ciencia de la Facultad de Ingeniería en la que abordan la evolución de los robots en el campo industrial, desde brazos robóticos utilizados en la manufactura, hasta robots con capacidades de interacción social.
El número 28 de la revista +Ciencia de la Facultad de Ingeniería nos comparte un artículo en el que se profundiza sobre la función de los denominados robots sociales, es decir, aquellos elementos que forman parte de una sociedad de robots y/o humanos.
Robótica social, la ciencia detrás de la interacción humana
La robótica es un área de desarrollo técnico que involucra varias de las áreas de conocimiento de la ingeniería, tales como electrónica, mecánica y tecnologías de la información, entre otras. En términos generales, un robot es una máquina con cierto grado de autonomía, que tiene por objetivo la realización de un trabajo, y que puede ser reprogramable.
Por otra parte, los robots han evolucionado de aplicaciones puramente industriales, como brazos robóticos utilizados en la manufactura, a robots con capacidades de interacción social; estos se conocen como robots sociales, en donde sus habilidades sociales pueden ser colectivas, imitando el comportamiento de los insectos, o individuales (1).
Así, se define a un robot social como aquellos elementos que forman parte de una sociedad de robots y/o humanos; que son capaces de reconocerse unos a los otros, de mantener interacciones sociales y de sostener comunicación explícita con los otros miembros de la sociedad para aprender unos de otros (1).
En este contexto, existen diversos aspectos técnicos que los robots sociales deben incluir en su diseño, para poder cumplir con sus funciones, entre los que están: actuadores, sensores, controlador, unidad de alimentación, transmisores, uniones mecánicas y la interfaz de usuario (2). Si bien estos elementos son comunes a la mayoría de los tipos de robots de servicio, aquellos con fines sociales deberán centrarse en la interfaz de usuario, los sensores y el controlador, ya que dichos robots tienen que ser capaces de censar el ambiente y tomar decisiones con base en la interacción humana o la llevada a cabo con otros robots.
Asimismo, los robots que tienen interacción con los seres humanos buscan cumplir con ciertos lineamientos en su diseño, tanto en la parte mecatrónica como en su diseño exterior, principalmente en temas de seguridad. Estudios indican que este tipo de robots deberán evitar situaciones inseguras, tales como choques que se pudieran dar entre el robot y el ser humano, ya que esencialmente se busca que los robots sociales sean independientes y capaces de trasladarse de manera autónoma (3).
Por otra parte, la toma de decisiones del robot es parte fundamental de la seguridad, pues el robot deberá estar diseñado para nunca sobrepasar las leyes de la ética y la moral. El autor Isaac Asimov hizo populares las tres leyes de la robótica en la década de los años cuarenta. Dichas leyes claramente subordinan los robots a los seres humanos, sin embargo, es posible que en una aplicación real se requiera más que estas leyes para asegurar que en una situación de peligro el robot efectivamente ponga al ser humano sobre su propia seguridad (4).
Con respecto al diseño, la forma del robot afectará la percepción del usuario, tal como se establece en lo que se conoce como efecto del Uncanny Valley (5). En términos generales, esta teoría establece que conforme un robot se parezca más a un ser humano, la reacción del observador atravesará por varias regiones, al inicio será positiva, hasta el punto en que el cerebro humano comience a desconfiar, ya que aunque el robot sea un androide y tenga un gran parecido a una persona, la percepción no permite que se considere al robot un ser humano saludable (6), como se puede apreciar en la Figura 1.
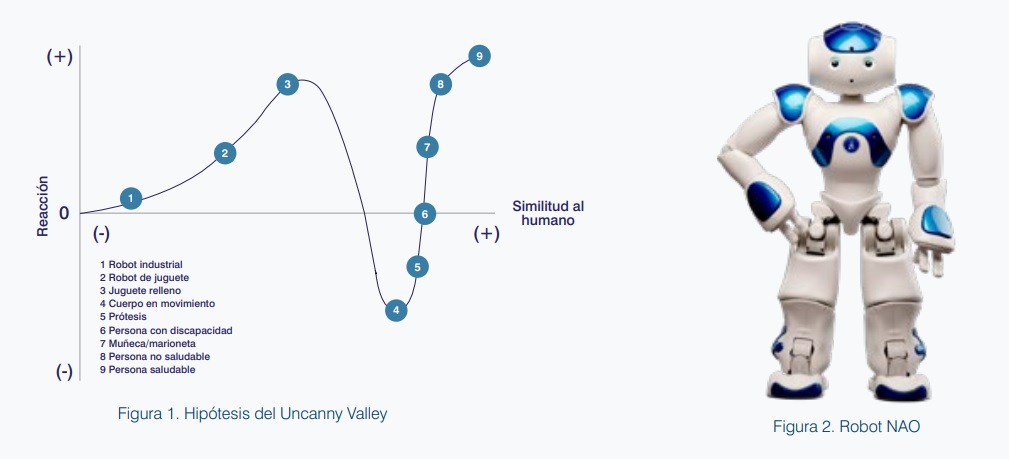
Figura 1. Hipótesis del Uncanny Valley
Figura 2. Robot NAO
En este contexto, el robot que permita una mejor interacción con el usuario será aquél que se encuentre en la cúspide de la percepción positiva, que en la gráfica corresponde a la región 3. Un ejemplo de un robot de esta categoría es el robot “NAO” que se muestra en la Figura 2 fabricado por SoftBank Electronics®, el cual es un humanoide que ha sido utilizado como una plataforma para desarrollar diversos proyectos de robótica social, específicamente en el área médica y principalmente trabajando con niños alrededor del mundo, pues dicho robot puede comunicarse hasta en veinte idiomas diferentes.
Además, en la Figura 3 se muestra un extracto del comparativo realizado (6), en donde se ejemplifican los tipos de robot que corresponden a cada una de las etapas del Uncanny Valley.
También, en el área de la comunicación verbal el lenguaje juega un papel relevante para propiciar la adecuada aceptación y percepción del robot. En este caso, el robot deberá de ser capaz de identificar y procesar las palabras emitidas por el usuario, las cuales podrán ser exclamaciones, instrucciones o simplemente el ruido ambiental al que estará expuesto, dando como resultado la emisión de algún mensaje o la ejecución de una actividad por parte del robot. Lo anterior se logra mediante la utilización de las herramientas de inteligencia artificial (AI, por sus siglas en inglés), con las cuales se pretende modelar a los seres humanos y sus procesos cognitivos. De la misma forma, existe evidencia que señala que la capacidad de sostener un diálogo fluido que permita captar la atención del usuario es igual o más importante que la apariencia física del robot (7).

Figura 3. Tipos de robot según teoría del Uncanny Valley
En conclusión, la robótica social es un área multidisciplinaria, específicamente la de los robots diseñados para la interacción humana, pues su diseño deberá incluir factores mecatrónicos acompañados de los elementos necesarios para lograr una percepción positiva por parte del usuario.
El diseño de un robot deberá caer en alguna zona del Uncanny Valley que esté relacionada con una percepción positiva, con la intención de lograr enlazar al usuario con el robot, y permitir un correcto desarrollo del objetivo para el cual el robot fue diseñado. Dichos objetivos pueden estar relacionados con fines médicos o terapéuticos, entre otros.
Asimismo, en términos de la apariencia física, el robot deberá estar diseñado para incorporar todos los elementos de seguridad necesarios y, generar confianza en el usuario, así como los elementos mecatrónicos suficientes que le permitan desarrollarse con independencia mientras recaba la información necesaria para la toma de decisiones. Finalmente, es importante que el robot cuente con una interfaz que incluya elementos de inteligencia artificial que le permitan sostener una comunicación fluida con el usuario. Sin estos tres elementos básicos, el robot social no será capaz de mantener una relación productiva con un ser humano y, por el contrario, será rechazado.
*Colaboración de la ingeniera Daniela Lucien Araujo Salgado y de la Master of Science, Isabel Lascuráin Gutiérrez, profesoras de la Facultad de Ingeniería del Campus Sur.
Referencias:
1. Fong, T., Nourbakhsh, I., y Dautenhahn, K. (2002). A Survey of Socially Interactive Robots: Concepts, Design and Applications. University of Hertfords-hire; 42(3-4):3-57.
2. Kumar, V. (2001). Introduction to Robotics. p. 1-21.
3. De Santis, A., Siciliano, B., De Luca, A., Bicchi, A. (2008). An atlas of physical human-robot interaction. Mech Mach Theory, 43(3): 253-70.
4. Leenes, R., Lucivero, F. (2014). Laws on Robots, Laws by Robots, Laws in Robots: Regulating Robot Behaviour by Design. Law, Innov Technol, 6(2): 193-220. http://www.tandfonline.com/doi/full/10.5235/17579961.6.2.193
5. Mori, M. (2018). The Uncanny Valley: The Original Es-say by Masahiro Mori. https://spectrum.ieee.org/auto-maton/robotics/humanoids/the-uncanny-valley
6. Mathur, MB., Reichling, DB. (2016). Navigating a so-cial world with robot partners: A quantitative carto-graphy of the Uncanny Valley. Cognition, 146: 22-32. http://dx.doi.org/10.1016/j.cognition.2015.09.008
7. Kiesler, S., Goetz, J. (2002). Mental Models and Cooperation with Robotic Assistants. CHI’02 Ext Abstr Hum factors Comput Syst, 576-7.
Da clic en la portada para conocer la revista completa

Para más artículos interesantes como este, te invitamos a consultar +Ciencia, la revista cuatrimestral de la Facultad de Ingeniería, que en cada número tiene contenido relevante de sus alumnos e investigadores. Da clic aquí para conocer todas las ediciones.
Más información:
+Ciencia. Revista de la Facultad de Ingeniería
Dra. María Elena Sánchez Vergara
elena.sanchez@anahuac.mx




